Как сделать из лего машину с мотором
Гоночная машинка из Lego и Arduino

Сегодня я хочу поделиться своей очередной самоделкой. Сделана она на основе Lego и Arduino. Для управления будем использовать пульт с передатчиком на 433 МГц. На этот раз мне захотелось сделать гоночный автомобиль. Приступим:
– Lego Technic 42022
– Arduino Nano
– DRV 8833
– Сервопривод SG-90
– Радио-модуль связи 433 МГц
– Мотор-редуктор 200 обмин, с диаметром вала 3мм
– 2 светодиода
– 2 резистора 150 Ом
– Конденсатор 10v 1000uF
– 2 однорядных гребенки PLS-40
– 2 разъема PBS-20
– Катушка индуктивности 68мкГн
– 6 NI-Mn аккумулятора 1.2v 1000mA
– Коннектор папа-мама двух контактный на провод
– Хомутик
– Провода разных цветов
– Припой
– Канифоль
– Паяльник
– Болтики 3х40 и гайки и шайбы к ним
– Болтики 3х20
Шаг 1 собираем корпус.
Необходимо собрать нашу машинку по Lego инструкции 42022 второй вариант с некоторой доработкой. Выполняем все действия с 3 по 6 страницу. Механизм с шестеренками нам не нужен. Lego двигатель тоже собирать не нужно. Однако понадобятся крепления двигателя собираемые на 14 – 19 страницах, кроме шестеренок и валов. Далее собираем все со страницы 20 по 74, кроме рычага на странице 25.
Шаг 2 механизируем корпус.
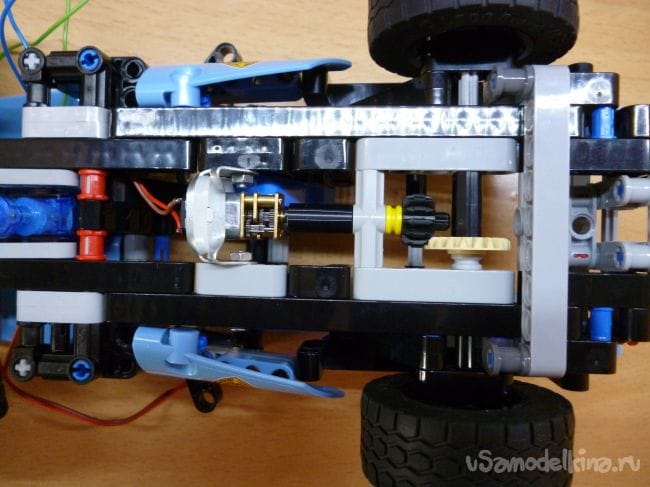
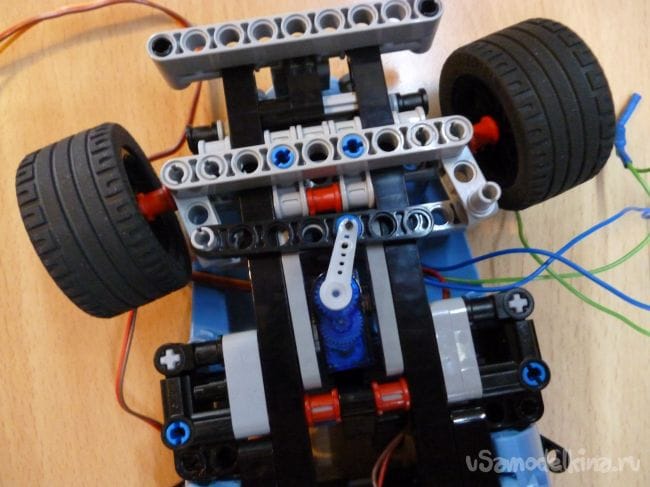
Приводить в движение нашу модель будет мотор-редуктор со скоростью 200 обмин. Можно использовать и с другим передаточным числом. Но, на мой взгляд, это оптимальный вариант. При 100 обмин – слишком медленно, 300 обмин – не хватает мощности и сильно греется двигатель. На вал мотор-редуктора надо надеть «леговскую» соединительную втулку и зафиксировать от проворачивания обрезком спички. Чтобы закрепить наш моторчик на модели, необхожимо согнуть деталь от металлического конструктора буквой «П» и хомутиком прикрепить мотор-редуктор к пластине. В итоге должно получиться следующее:


При помощь болтиков 3х20 прикручиваем наш моторчик к модели. Сильно затягивать не стоит! Иначе можно повредить детали Lego конструктора. На модели это выглядит так:
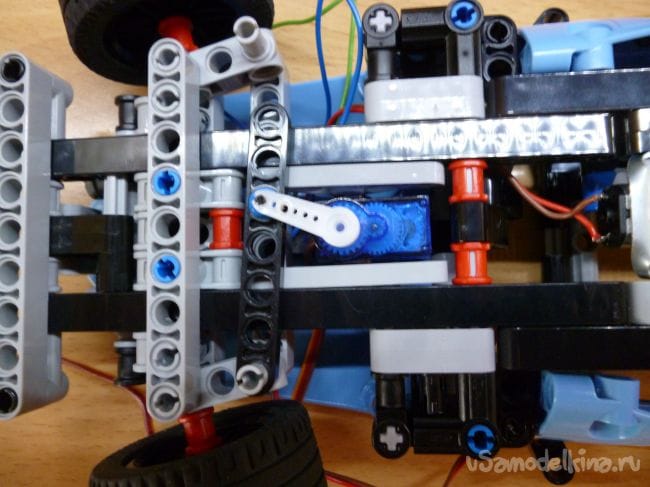
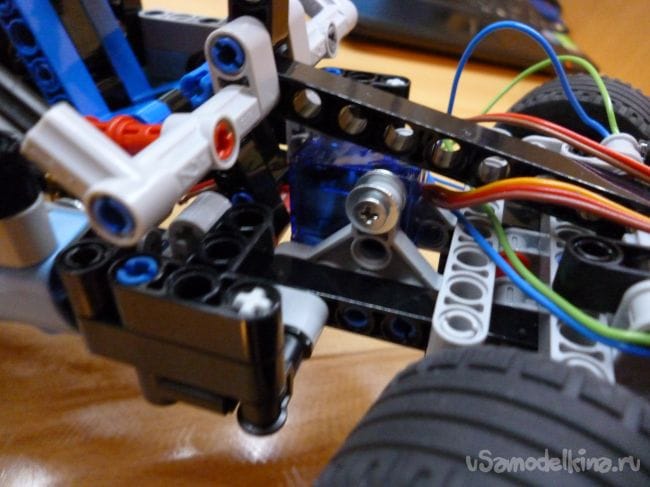
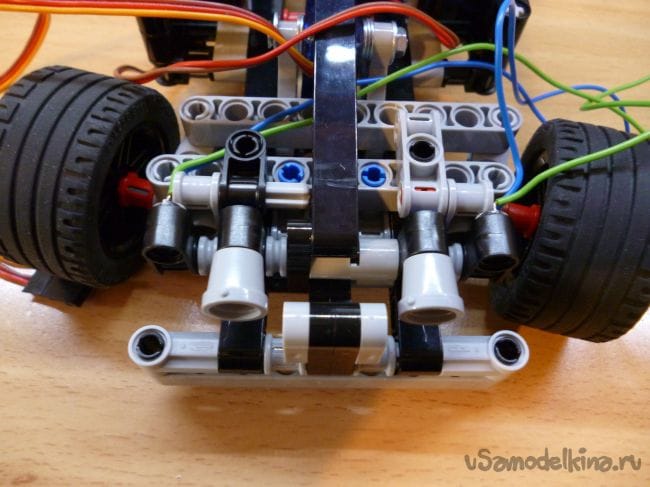
Для осуществления поворота возьмем несколько модифицированный сервопривод SG-90. Корпус надо аккуратно просверлить, чтобы не задеть внутренние части, сквозное отверстие диаметром 3.2 мм или просто вырезать канцелярским ножом.

Вставляем болтик в проделанное отверстие, а по краям надеваем треугольные пластины и фиксируем гайками. На вал сервопривода надеваем рычаг и прикручиваем к рычагу Lego деталь. На машинке это выглядит так:
Шаг 3 электрика.
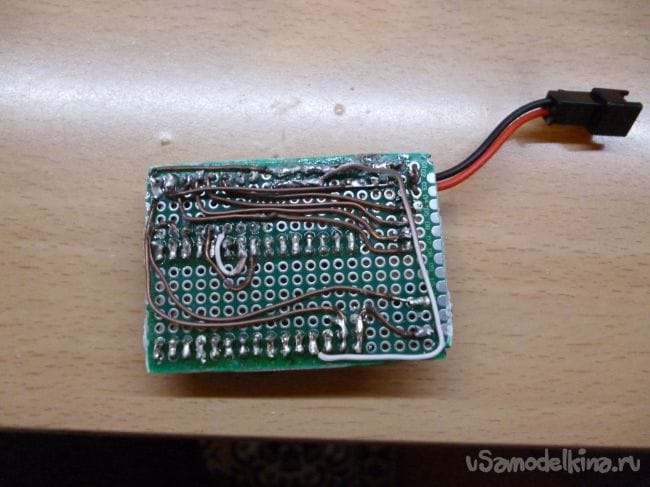
Паяльник в руки и вперед. Всю электрику можно собрать просто соединив монтажными проводами. Но это неудобно, так как требует много места. Кроме этого высока вероятность некачественного контакта. Поэтому лучше спаять все на монтажной плате по следующей схема:
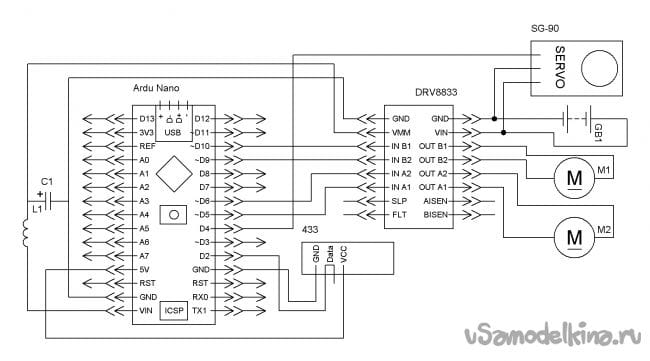
Внесу немного ясности: конденсатор можно брать любой маломощный, катушка индуктивности тоже какую найдете, это нужно для стабилизации напряжения микроконтроллера. К приемнику надо припаять антенну. У меня получилось следующее:

Ставим Arduino Nano и DRV 8833 на свои места:

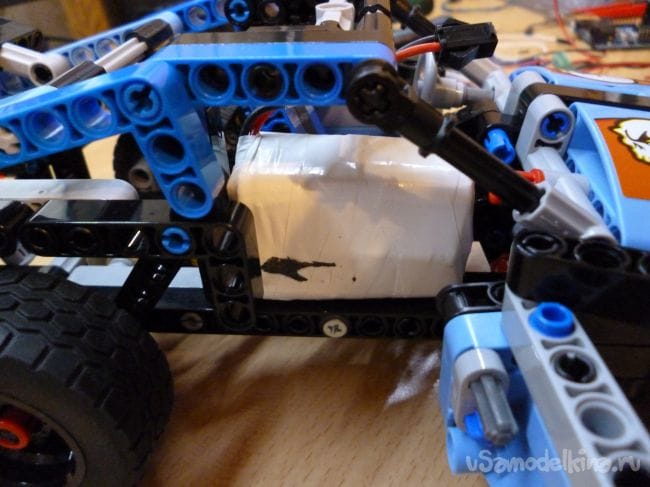
Для питания будем использовать 6 аккумулятора Ni-Mn 1.2v 1000mA, спаянных последовательно и смотанных изолентой. Приклеиваем их на двусторонний скотч пассажирское место.


Соединяем все согласно схеме и устанавливаем в задней части машинки. Также можно добавить пару светодиодов. Поставим их на место фар и подключим к 14 контакту (A2).
Шаг 4 прошивка.
Для написания прошивку я использовал Arduino IDE. Актуальная версия на момент написания статьи 1.8.1. Реализовать протокол связи посредством модулем 433 МГц удобно с помощью библиотеки «rc-switch-2.52». Вам надо скачать ее и добавить в папку «libraries» Arduino IDE.
Подключаем Arduino и прошиваем следующей прошивкой:
Для проверки работоспособности нашей модели понадобится вторая плата Arduino. Необходимо ко второй плате подключить радиопередатчик 433 МГц. Передатчик подключается так:
VCC (передатчика) к 5+ (Arduino),
GND к GND,
DATA к D10.
Записать туда измененный скетч SendDemo. Он находится в примерах в установленной нами библиотеки, и служит для отправки команд. Перед прошивкой скетч надо немного изменить, а именно изменить передаваемые команды. В зависимости от того, что надо проверить пишем в строку отправки следующие команды:
«1» – движение вперед (команду писать без кавычек!)
«2» – движение назад
«15» – полная остановка
«3» – поворот руля влево
«4» – поворот руля вправо
«5» – установить руль посередине
«10» – включить фары
«11» – выключить фары
Изготовление пульта с радиопередатчиком 433 МГц – тема для отдельной статьи. Я обязательно займусь написание инструкции по изготовлению такого пульта.
Хочу сказать, что этот вариант подходит практически для любой модели Lego машинки. Достаточно подключить всю механику и найти место под плату. А если включить фантазию, то можно механизировать любую модельку.


Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Гоночная машинка из Lego и Arduino
Сегодня я хочу поделиться своей очередной самоделкой. Сделана она на основе Lego и Arduino. Для управления будем использовать пульт с передатчиком на 433 МГц. На этот раз мне захотелось сделать гоночный автомобиль. Приступим:
– Lego Technic 42022
– Arduino Nano
– DRV 8833
– Сервопривод SG-90
– Радио-модуль связи 433 МГц
– Мотор-редуктор 200 обмин, с диаметром вала 3мм
– 2 светодиода
– 2 резистора 150 Ом
– Конденсатор 10v 1000uF
– 2 однорядных гребенки PLS-40
– 2 разъема PBS-20
– Катушка индуктивности 68мкГн
– 6 NI-Mn аккумулятора 1.2v 1000mA
– Коннектор папа-мама двух контактный на провод
– Хомутик
– Провода разных цветов
– Припой
– Канифоль
– Паяльник
– Болтики 3х40 и гайки и шайбы к ним
– Болтики 3х20
Шаг 1 собираем корпус.
Необходимо собрать нашу машинку по Lego инструкции 42022 второй вариант с некоторой доработкой. Выполняем все действия с 3 по 6 страницу. Механизм с шестеренками нам не нужен. Lego двигатель тоже собирать не нужно. Однако понадобятся крепления двигателя собираемые на 14 – 19 страницах, кроме шестеренок и валов. Далее собираем все со страницы 20 по 74, кроме рычага на странице 25.
Шаг 2 механизируем корпус.
Приводить в движение нашу модель будет мотор-редуктор со скоростью 200 обмин. Можно использовать и с другим передаточным числом. Но, на мой взгляд, это оптимальный вариант. При 100 обмин – слишком медленно, 300 обмин – не хватает мощности и сильно греется двигатель. На вал мотор-редуктора надо надеть «леговскую» соединительную втулку и зафиксировать от проворачивания обрезком спички. Чтобы закрепить наш моторчик на модели, необхожимо согнуть деталь от металлического конструктора буквой «П» и хомутиком прикрепить мотор-редуктор к пластине. В итоге должно получиться следующее:
При помощь болтиков 3х20 прикручиваем наш моторчик к модели. Сильно затягивать не стоит! Иначе можно повредить детали Lego конструктора. На модели это выглядит так:
Для осуществления поворота возьмем несколько модифицированный сервопривод SG-90. Корпус надо аккуратно просверлить, чтобы не задеть внутренние части, сквозное отверстие диаметром 3.2 мм или просто вырезать канцелярским ножом.
Вставляем болтик в проделанное отверстие, а по краям надеваем треугольные пластины и фиксируем гайками. На вал сервопривода надеваем рычаг и прикручиваем к рычагу Lego деталь. На машинке это выглядит так:
Шаг 3 электрика.
Паяльник в руки и вперед. Всю электрику можно собрать просто соединив монтажными проводами. Но это неудобно, так как требует много места. Кроме этого высока вероятность некачественного контакта. Поэтому лучше спаять все на монтажной плате по следующей схема:
Внесу немного ясности: конденсатор можно брать любой маломощный, катушка индуктивности тоже какую найдете, это нужно для стабилизации напряжения микроконтроллера. К приемнику надо припаять антенну. У меня получилось следующее:
Ставим Arduino Nano и DRV 8833 на свои места:
Для питания будем использовать 6 аккумулятора Ni-Mn 1.2v 1000mA, спаянных последовательно и смотанных изолентой. Приклеиваем их на двусторонний скотч пассажирское место.
Соединяем все согласно схеме и устанавливаем в задней части машинки. Также можно добавить пару светодиодов. Поставим их на место фар и подключим к 14 контакту (A2).
Шаг 4 прошивка.
Для написания прошивку я использовал Arduino IDE. Актуальная версия на момент написания статьи 1.8.1. Реализовать протокол связи посредством модулем 433 МГц удобно с помощью библиотеки «rc-switch-2.52». Вам надо скачать ее и добавить в папку «libraries» Arduino IDE.
Подключаем Arduino и прошиваем следующей прошивкой:
Для проверки работоспособности нашей модели понадобится вторая плата Arduino. Необходимо ко второй плате подключить радиопередатчик 433 МГц. Передатчик подключается так:
VCC (передатчика) к 5+ (Arduino),
GND к GND,
DATA к D10.
Записать туда измененный скетч SendDemo. Он находится в примерах в установленной нами библиотеки, и служит для отправки команд. Перед прошивкой скетч надо немного изменить, а именно изменить передаваемые команды. В зависимости от того, что надо проверить пишем в строку отправки следующие команды:
«1» – движение вперед (команду писать без кавычек!)
«2» – движение назад
«15» – полная остановка
«3» – поворот руля влево
«4» – поворот руля вправо
«5» – установить руль посередине
«10» – включить фары
«11» – выключить фары
Изготовление пульта с радиопередатчиком 433 МГц – тема для отдельной статьи. Я обязательно займусь написание инструкции по изготовлению такого пульта.
Хочу сказать, что этот вариант подходит практически для любой модели Lego машинки. Достаточно подключить всю механику и найти место под плату. А если включить фантазию, то можно механизировать любую модельку.
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Источники:
http://usamodelkina.ru/8913-gonochnaya-mashinka-iz-lego-i-arduino.html
http://usamodelkina.ru/8913-gonochnaya-mashinka-iz-lego-i-arduino.html